Первая запись в дневнике Ссылка Перейти
Diary Entries in Russian
Recent diary entries
Тестовая
Привет!
Меня зовут Александр. На ОСМ я совсем недавно в качестве картографа, но пользуюсь картами уже более десяти лет.
Что заставило стать картографом?
Дело в том, что многие навигаторы для незрячих основываются на данных ОСМ. Получается, что иногда мы ходим по местам, которых давно нет, а новых не появляется. Просто решил по мере своих скромных сил вносить правки для тех мест, где часто бываю и про которые мне известно.
Техническая сторона вопроса
Для снятия координат использую навигационное приложение Seeing Assistent Go. В среднем, точки фиксируются с точностью 5 метров. В виду того, что у меня есть ограничения зрения, точную позицию на карте я установить не могу.
Пакеты правок формирую при помощи навигатора “Osmand”. Там это делать легко. Стоит лишь знать координаты места, которые хочешь добавить и данные о нём. Всё в достаточной мере доступно для программ экранного доступа.
К сожалению, попытка вносить правки через сайт ОСМ увенчалась неудачей. Не смог разобраться в интерфейсе и добавить место, потому в дальнейшем буду пользоваться исключительно Османдом.
Что сделано?
Немногое.
- Отредактированы названия для нескольких остановок. В нашем городе недавно случилось их масштабное переименование, и карты ОСМ за ним не поспели.
- Обновлена информация о тех местах, где я работаю и о нескольких недавно посещённых.
Что в планах?
Планомерно добавлять информацию об известных мне объектов. Добиться права на получение оперативных данных карт.
Заключение
Собственно, всё! Буду рад, если мои правки проверят опытные члены сообщества и, при необходимости, их скорректируют. Вдруг маркер точки подвинулся не туда или случилась другая беда! Всем желаю успехов и мирного неба над головой!

…будьте вы людьми, сделайте опцию загрузки всех изменений в один набор правок!
Posted by dierfort on 12 August 2025 in Russian (Русский).
Last updated on 28 August 2025.
Здание ГИБДД заброшено.
Координаты 57.189472, 39.42346

Здание заброшено,
Ростовский МО МВД переехало на ул Февральская .

Posted by dierfort on 11 August 2025 in Russian (Русский).
Last updated on 28 August 2025.
Координаты
57.190312, 39.427535
Дом снесён

Ярославская область, город Ростов Великий, улица Бебеля Координаты 57.190766, 39.428734, Дом сгорел полностью, место заросли кустарники, деревья



Posted by solenoid jam on 3 July 2025 in Russian (Русский).
Не высокая частота обновления спутниковых снимков, не всегда позволяет добавлять новые здания. В этой ситуации можно воспользоваться схемами с паспортов строек. При перерисовке схемы возникает проблема, состоящая в том, что фотографии схем содержат искажение перспективы, которое надо как то исправлять. Ниже предложен не сложный способ того, как можно это сделать с помощью растрового графического редактора GIMP, векторного - Inkscape, а так же JOSM с установленным плагином ImportVec.
Posted by Mikhail Kuzin on 20 June 2025 in Russian (Русский).
junction:cluster:radius - тэг для указания максимально возможного радиуса влияния/отношения пересечения на окружающие объекты
Синтаксис
node.tags {
junction:cluster:radius: number[1..N]
}
Применяется для объектов
Когда этот тэг применяется для объектов типа node, эта эта точка должна являться пересечением - junction. См статью про это.
Тэг указывает радиус окружности в которую может быть вписана функциональная зона для данного пересечения.
Это означает, что в данной зоне другие объекты (парковки, переходы, стоп-линии и так далее) могут отображаться или интерпретироваться
как-то иначе. В какой-то степени это понятие соотносится с понятием функциональная зона перекрестка, только в данном случае - простейшего пересечения.
Главной мотивацией введения данного тэга было обеспечить возможность группировки нод соседних пересечений в обобщающее понятие “Перекресток”. Для этого у нас есть несколько различный вариантов, как это может быть сделано:
- Relation:
type:intersection, members[node1,...,nodeN, way1,..., wayM] - Атрибут у ноды который является ключом обобщения(имя-идентификатор кластера)
junction:cluster = name or id - Радиус, который при наложении(union) окружностей даст общий полигон для некоторого множества нод
junction:cluster = 5
Плюсы и минусы первых двух подходов очевидны. Опять relation, ссылочная целостность, генерация тэга. Все эти способы решают одну задачу - управляемая кластеризация нод пересечений в некую более сложную структуру данных.
Рассмотрим 3 способ.
- Очень геометричный, отражает площадные/линейные характеристики пересчения
- Не требует поддержки ссылочной целостности( как в 1) и контроля уникальности, для 2
- Можно найти зависимость или корреляцию с другими свойствами ноды (число полос)
- Просто числовое значение в метрах
- Формально нового объекта типа перекресток не появляется, но он всегда может быть получен простейшей операцией buffer + union
- То есть принцип бритвы Окамма - не плодим новых сущностей без необходимости
Posted by Mikhail Kuzin on 20 June 2025 in Russian (Русский).
junction:radius - тэг для указания максимально возможной зоны конфликта на пересечении
Синтаксис
node.tags {
junction:radius: number[1..N]
}
way.tags {
junction:radius:lanes: number[1..N]|number[1..N]|...
junction:radius:lanes(:forward|backward)(:start|end) number[1..N]|number[1..N]|...
}
Применяется для объектов
Когда этот тэг применяется для объектов типа node, эта эта точка должна являться пересечением.
Тэг указывает радиус окружности в которую может быть вписана зона конфликта путей для данного пересечения
junction:radius - радиус окружности соотносящийся с зоной конфликта, в котором участвуют
транспортные средства
Когда этот тэг применяется дл объекта way, то обязательно применять суффикс lanes. Значения переопределяют радиус конфликтной зоны пересечения индивидуально для каждой полосы, если заданы.
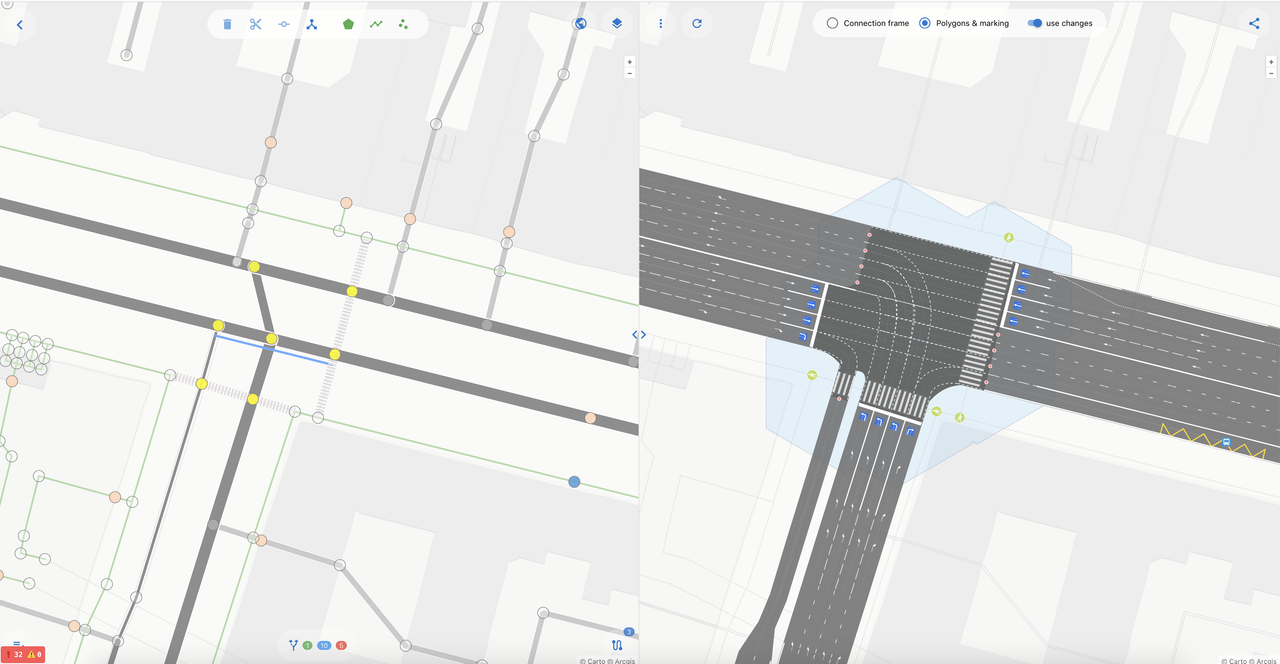
Рассмотрим несколько примеров. На рисунках ниже голубая окружность в правой части рисунка и есть визуализация значения данного тэга.
Пример 1
junction:radius = 4
Зона конфликта не описывается окружностью указанного радиуса(ширина и количество полос), значение задано неверно.
Posted by Mikhail Kuzin on 20 June 2025 in Russian (Русский).
junction:shape - тэг для указания характерной формы пересечения 2х путей
Синтаксис
node.tags {
junction:shape: rectangle|oblique|staggered
}
Применяется для объектов
Этот тэг применяется только для объектов типа node и эта точка должна являться пересечением двух или 4х way.
Для самых распространенных пересечений 2х дорог или одной дороги пешеходного перехода.
Он отражает форму пересечения и отношения между воображаемыми или реальными стоп линиями конфликтующих путей в этом пересечении.
Причины введения
Две дороги могут пересекаться под совершенно разными углами, см примеры ниже, но углы пересечения иногда не отражает, как автомобили или пешеходы или другие транспортные средства, будут останавливаться перед этим пересечением. Форму задает проект организации дорожного движения и фантазия проектировщика.
Значения
-
rectangle- стоп линии конфликтующих путей находятся под углом ~ 90 градусов друг относительно друга. Точки стоп линий для каждой полосыlanesоткладываются по перпендикуляру от осевой. Стоп линия одна - общая линия для всех lanes (рисунки 1,4,5). -
oblique- стоп линии конфликтующих путей находятся под углом меньше чем 90 градусов (~ 30 - 70). Точки стоп линий для каждой полосыlanesоткладываются по параллельно пути, который конфликтует с данным. Стоп линия одна - общая линия для всех lanes (рисунки 2,4,5). -
staggered- некое промежуточной состояние между rectangle и oblique, угол пересечения может быть любой, главное отличие в том, что для каждой lane своя отдельная стоп линия на разных расстояниях от node (рисунок 3,5).
Примеры
connect - ключ для указания связности полос на пересечении
–
Синтаксис
way.tags {
connect(:lanes(:forward|backward)): number;number;...||
}
Применяется для объектов
Этот тэг применяется только для объектов типа way и может быть расширен двумя широко применяющимеся суффиксами :lanes и :forward|backward
Причины введения
Сейчас в OSM существует способ для точного задания связности между полосами с помощью отношений. relation:connectivity
Основным недостатками этого являются, то что это:
- Очень громоздко, создавать отношение или даже несколько для одного way (from)
- Отношения очень хрупкие и их легко сломать, постоянно нужен контроль их целостности
- Для выходов из одного way в разные стороны (несколько way назначения) может понадобиться несколько relation - нельзя сделать одним объектом
- Повышенные требования к редактору и опыту маппера
- Лишняя сущность, нарушает бритву Оккама, с поворотми(
turn:lanes) получилось же без relation.
Для решения проблемы однозначного ввода/редактирования связности полос на перекрестке, нужно более простое решение, и желательно типовое.
За основу можно взять существующий подход с поворотами:
way.tags:
lanes:forward = 3
turn:lanes:forward = through|through;right|right
Отлично, всем понятно и широко применимо. Непосредственно для объекта типа way
задается несколько тэгов со связным содержимым. От количества полос зависит количество секций
на которые будет разбито значения тега turn:lanes:forward из каждой полосы
мы задаем направление поворота.
Можем ли мы наследовать этот подход, но при этом задавая что-то, что будет адресовать полосу приемник?
Например, таким образом
way.tags:
lanes:forward = 3
turn:lanes:forward = through|through;right|right
connect:lanes:forward = 0|1;2|3
Posted by Mikhail Kuzin on 18 June 2025 in Russian (Русский).
OSMPIE - OSM Perfect Intersection’s Editor
Введение
На больших увеличениях, глазу гораздо приятнее смотреть на нечто, что больше похоже на дорогу, чем просто на оранжевые и желтые полоски. На карте мы часто видим рядом такие объекты как дерево, парковка велосипедов, пониженный бордюр на переходе,люк, скамейка. И при этом такой сложный объект, как дорога или перекресток - это просто одна-две цветных линии. Давайте это как-то исправим уже?
OSMPIE состоит из двух главных компонентов:
- Это рендер движок дорог, который превращает объекты дорог OSM (атрибутированные way,nodes,relations) в новое множество геообъектов топологически и геометрически связанных между собой и исходными OSM объектами.
- Это специализированный редактор/вьювер для быстрого и удобного картирования дорог и перекрестков в OSM.
Начало:
Posted by Mikhail Kuzin on 16 June 2025 in Russian (Русский).
Last updated on 17 June 2025.
Пересечения и перекрестки
Описание пересечений в OSM как и многое достаточно хаотично и лоскутно. См Key:junction Чтобы готовить перекрестки более совершенными надо систематизировать существующие тэги и …. добавить еще немного хаоса)))
node:
junction = controlled|uncontrolled|inout|joint
Продолжая развивать тему тэгирования точек, в настоящее время существуют и применяются тэги https://wiki.openstreetmap.org/wiki/Tag:junction=yes,
https://wiki.openstreetmap.org/wiki/Tag:junction=uncontrolled
При работе над рендером мы провели классификацию пересечений, которые вероятно стоит различать и предлагаем расширить этот список, но саначала…
Основные признаки пересечений
-
Участники- точка принадлежит 2м и более way -
Размер- неотъемлемым, хотя и невсегда явным атрибутом пересечения будет являться некая фигура, площадь, многоугольник - нечто что будет соотносится(описывать,вписывать) с реальными линейными размерами места, где будет(не обязательно) происходить конфликт участников движения. В OSMPIE мы предложили использовать окружность и соответсвенно радиус, как аттрибут смjunction:radius -
Связность- появляются такие понятия(точки) входа и выхода в пересечение и необходимости указания(атрибуции) их связи друг сдругом. Смconnect:lanes,https://wiki.openstreetmap.org/wiki/Tag:relation[type=connectivity],turn:lanes -
Конфликтные точки- необязательный, часто присутствующий признак - конфликтности одних связей с другими и место(координаты) этого конфликта.
Существует еще один признак пересечений, но от уже относится не к пересечению самому по себе, а к их множествам. Пересечения склонны группироваться в сложные объекты - “перекрестки” - то есть образовывать явные и конечные множества - кластера.
Самым оптимальным вариантом атрибутирования, который бы мог управлять процессом и соответственно результатом кластеризации
тоже является радиус окружности - см. тэг junction:cluster:radius
Классификация пересечений:
JOSM + плагины:

Геоинформационный портал Калужской области - набор электронных картографических сервисов, обеспечивающих открытый доступ заинтересованным пользователям к массиву пространственных данных нашего региона посредством глобальной сети Интернет. Сссылка
Реестр парковок г. Калуги
Реестр сведений о парковках общего пользования, расположенных на территории муниципального образования “Город Калуга”.
Комплексная схема организации дорожного движения города Калуги
Содержит перечень дорог с их категорийностью и другими характеристиками (см. файл Отчет КСОДД).
АО “УКОН”
Информация о городских ярмарках и банях.
Время чтения: 10 минут.
Введение
Как и почти все, я включал геолокацию, не задумываясь, как это работает, но проблемы, возникшие на моем смартфоне вынудили меня углубиться в тему и написать статью, чтобы, в первую очередь, упорядочить собственные знания и во вторую, сэкономить ваше время при решении схожих задачь.
Статья написана любителем и не претендует ни на что. Если нашли ошибки, укажите на них в комментариях.
Т.к. смартфон является единсвенным инструментом картографии для подавляющего числа мапперов вне дома, неработающая геолокация может стать катастрофой. Чтобы этого не произошло, нужно выполнить ряд простых действий, но сначала термины)
Немного терминологии:
1. GNSS - Global Navigation Satellite System
Глобальная навигационная спутниковая система. Именно ее большинсво людей называют ошибочно GPS. В мире есть несколько систем GNSS: ГЛОНАСС - Россия, Navstar GPS - США, Beidou - Китай, Galileo - Европа, IRNSS - Индия и другие. Полное покрытие имеет только ГЛОНАСС, GPS и Beidou. Все (или почти все) современные модули геолокации смартфонов используют несколько систем навигации одновременно. Как правило, это: GPS, GLONASS, Galileo, Beidou.
2. Альманах
- вид данных, которые передаются спутником на землю. Содержит информацию об орбитах всех спутников. Эта информация хранится на смартфоне и позволяет спрогнозировать примерное местоположение спутника в течении времени. (Например: Дня) Эта информация достаточно долго хранится, но на ее основе будет не точное определение геопозиции.
Альманах для GPS транслируются каждые 12,5 минут, ГЛОНАСС каждые 2,5 минуты. Албманах может потерять свою актуальногсть, если на смратфоне сбилось время или местоположение изменилось на 100-200-300 км.